دسته بندی ها
دسته بندی ها
خرید الکتروموتور
در بیانی ساده باید بگوییم که الکتروموتور یک دستگاه تبدیل انرژی است که انرژی الکتریکی را به انرژی مکانیکی تبدیل میکند. در اکثر مواقع الکتروموتورها کاربردی صنعتی دارند اما برخی از الکتروموتورها، از نوع کولری هستند. اگر شما قصد خرید الکتروموتورهای صنعتی را دارید، در ادامه با مجموعه رایکا صنعت همراه باشید تا اطلاعات بیشتری در مورد این دستگاه کسب نمایید. رایکا صنعت به شما انواع دینام صنعتی، اجزا و کاربرد آن را معرفی میکند.

الکتروموتور چیست؟
ممکن است شما بارها نام الکتروموتور را شنیده باشید اما ندانید که الکتروموتور چیست. این دستگاه انرژی الکتریکی را به انرژی مکانیکی تبدیل میکند. همانطور که ذکر شد این دستگاه کاربردی صنعتی دارد و در صنایع گوناگونی از آن استفاده میشود. استفاده از این محصول باعث میشود که انرژی الکتریکی به انرژی مکانیکی تبدیل شود. از این دستگاه که به آن دینام صنعتی نیز میگویند، برای چرخش دستگاههای مختلفی مانند کمپرسورها، پمپها، گیربکس، فن و سایر دستگاههای مکانیکی استفاده میشود. در واقع وظیفه این دستگاهها تولید گشتاور است. در حقیقت گشتاور باعث حرکت دورانی میشود که این حرکت میتواند نیروی محرکه بسیار مهمی برای دستگاه محسوب شود و باعث ایجاد چرخش در سیستمهای دوار شود.
الکتروموتورهای صنعتی در کارخانهها، واحدهای تولیدی و کارگاهها استفاده زیادی میشود. استفاده از این دستگاه در صنایع مختلفی مانند صنایع راهسازی، خودروسازی، فولاد، نساجی، کشاورزی و... نیز رایج است. نکتهای که اهمیت دارد این است که از الکتروموتورها در صنایع بسیار مختلفی استفاده میشود و کاربرد آن در جهان امروز بدون هیچ گونه محدودیتی است زیرا مختلف با استفاده از آن عملکردی بهتر خواهند داشت. برای استعلام قیمت الکتروموتور با کارشناسان رایکا صنعت تماس بگیرید.
اجزای الکتروموتور
الکتروموتور مورد نظر شما از هر نوعی که باشد، دارای اجزای مشخصی است که به آنها اشاره میکنیم. شما دوستان گرامی حتماً هنگام خرید دینام صنعتی باید به اجزای آن دقت کنید.
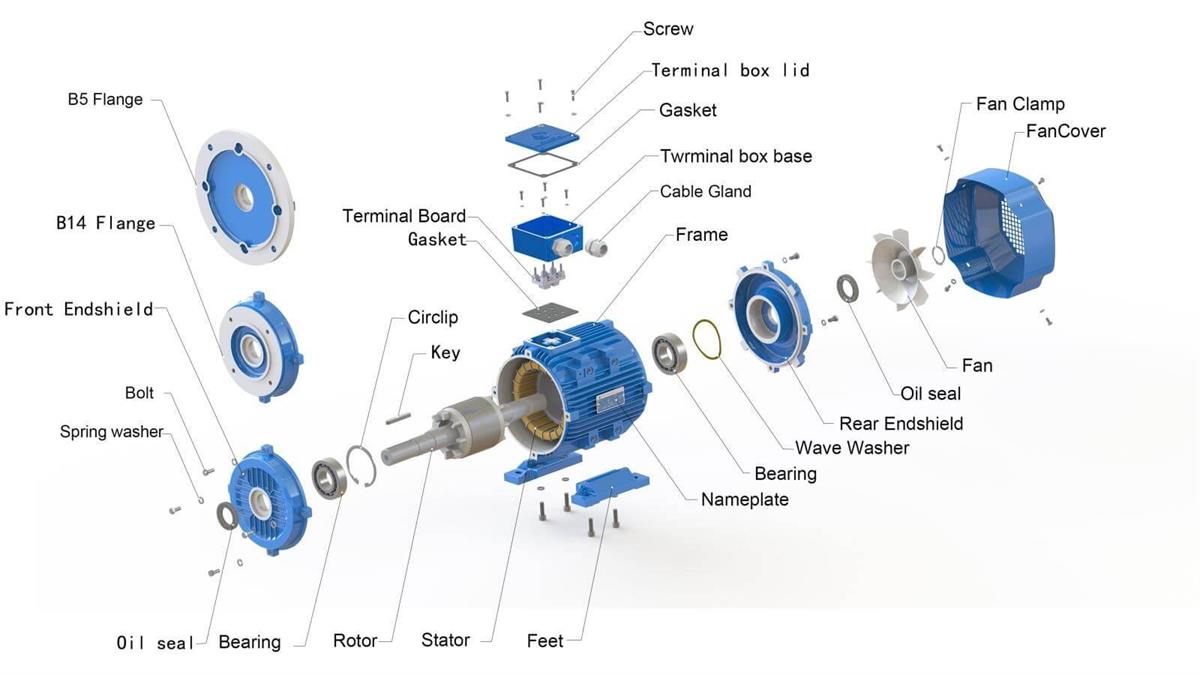
پوسته الکتروموتور
پوسته الکتروموتور یکی از اجزای این دستگاه است که به آن فریم موتور یا قاب محافظ نیز میگویند. در حقیقت این قطعه از اجزای داخلی موتور محافظت میکند. در مورد پوسته الکتروموتور باید بدانید که توان حرارتی دستگاه مهم است زیرا هر چقدر که فلزات قویتر میشوند، توان حرارتی دستگاه بیشتر خواهد شد. این یعنی توان حرارتی پوسته چدنی از توان حرارتی پوسته آلومینیومی بیشتر است و البته توان حرارتی پوسته فولادی نیز از نوع چدنی بالاتر خواهد بود.
استاتور
استاتور بخش دیگری از دینام صنعتی است که از چند لایه فلزی ساخته میشود. از به هم پیوستن این چند لایه فلزی، قفسهای استوانهای شکل تولید میشود که روتور داخل آن قرار خواهد گرفت. برای اینکه میدان مغناطیسی بهتری ایجاد شود، شیارهایی روی بدنه ایجاد میکنند که داخل آنها سیم پیچ یا کلاف قرار میگیرد. همین سیم پیچ است که بعد از اتصال برق سه فاز میدان مغناطیسی ایجاد خواهد کرد و باعث چرخش روتور میشود. استاتور بخشی ثابت در الکتروموتور محسوب میشود.
روتور یا آرماتور
روتور یا آرماتور بخش دیگهای از دستگاه است که متحرک است. روتور از چند قطعه فولادی تشکیل شده است. در بین این قطعات میلههای آلومینیومی یا مسی قرار میگیرد. هنگامی که برق وارد سیم پیچی استاتور میشود، استاتور میدان مغناطیسی ایجاد خواهد کرد و میدان مغناطیسی روی میلههای میانی روتور جریان ایجاد میکند و روتور میچرخد. به خاطر بسپارید که روتور الکتروموتور میتواند یکی از دو نوع سیم پیچی یا قفس سنجابی باشد.
بلبرینگ
یکی از نقشهای بسیار مهم در دینام صنعتی را بلبرینگ ایفا میکند. بلبرینگ از اصطکاک جلوگیری میکند و به روتور برای چرخش بهتر محور شافت کمک میکند. از دیگر وظایف بلبرینگ میتوان به حفظ تعادل روتور در سرعتهای بالا اشاره کرد.
شافت
از دیگر اجزای دینام صنعتی میتوان به شافت اشاره کرد. این قطعه از جنس فولاد آبکاری شده میباشد و توان حرارتی بالایی دارد. شافت که به آن شفت نیز میگویند، باعث اتصال الکتروموتور به دستگاه دیگر خواهد شد. در واقع این شافت است که انرژی الکتریکی تبدیل شده به انرژی مکانیکی را به سایر دستگاهها انتقال میدهد.
فن
فن در قسمت انتهای دستگاه قرار میگیرد و باعث تبادل هوای داخل موتور میشود. در حقیقت این فن یا پروانه پمپ است که با مکش هوا به داخل موتور، سیم پیچ و ساختمان آن را خنک میکند. اگر شما دوستان گرامی قصد خرید دینام را دارید، باید بدانید که رایکا صنعت انواع الکتروموتور ایرانی و خارجی را با برندهای معتبری به شما ارائه میدهد. برای تهیه بهترین برند الکتروموتور مانند الکتروموتور جمکو، الکتروموتور موتوژن و الکتروژن و استعلام قیمت الکتروموتور صنعتی با کارشناسان رایکا صنعت تماس بگیرید و یا به وبسایت این مجموعه مراجعه نمایید. لازم به ذکر است که شما میتوانید از این مجموعه برای خرید ژنراتور و خرید پمپ نیز اقدام نمایید.
منبع تغذیه
به سیستم تامین برق این دستگاه، منبع تغذیه میگویند که در زمان استارت موجب ایجاد میدان مغناطیسی خواهد شد. محل اتصال موتور به منبع تغذیه درون ترمینال باکس است. به خاطر بسپارید که دینامهای صنعتی از دو جریان متناوب و مستقیم تغذیه میشوند.
کلاف
کلاف یا همان سیم پیچ، سیمهایی هستند که درون استاتور قرار دارند. خاصیت سیم پیچ رسانایی است و از مس تشکیل میشود.
شکاف هوایی
در واقع شکاف هوایی جزئی از این دستگاه نیست اما از آنجا که وجود آن بسیار اهمیت دارد، باید از آن یاد شود. شکاف هوایی فاصله بین روتور و استاتور است که برای چرخش جریان مغناطیسی درون دستگاه وجود دارد. در بهترین حالت ممکن در یک دینام صنعتی، این فاصله باید در کمترین حد خود قرار بگیرد که صدای الکتروموتور زیاد نشود.
خرید انواع الکتروموتور
الکتروموتور پایه دار
در این الکترو موتور ها به نام B3 نیز معروفند، الکتروموتور دارای 2 پایه است که روی سطح مسطح ( شاسی یا زمین) قرار می گیرد. و شفت به وسیله کوپلینگ به پمپ یا تجهیزات دیگ متصل می شود. این نوع الکتروموتور به علت تعادل بالایی که برای موتور مقدور می کند قابلیت تحمل قدرت و فشارهای بالا را نیز دارد و برای استفاده در محیط های صنعتی با توان و گشتاور بالا عرضه می شود.

الکترو موتور فلنج دار
این الکتروموتور هارا با نام , B5 B14نیز می نامند. جنس فلنچ ها از آلومینیوم یا چدن مناسب با جنس بدنه موتور می سازند. نحوه اتصال این موتور ها به صورت مستقیم به گیربکس پمپ های مختلف (بیشتر حلزونی و سیرکولیشن) می باشد. د واقع فلنج این موتور ها به صورت کامل با دهانه گیربکس یا پمپ متصل می گردد. از این نوع موتورها بیشتر در پمپ های سیرکولیشن یا پمپ های خانگی استفاده می کنند. این فلنچ ها از لحاظ ساختمان دارای انواع مختلفی هستند مانند فلنج کور، فلنج نر و ماده، فلنج رزوه ایی ، فلنج گلودار جوشی و ... که هر کدام از نظر نحوه اتصال با هم متفاوتند و طبق استاندارد های APL ، ANSI ، ISO برای فشار و دماهای مختلف طراحی می شوند.

الکتروموتورهای پایه فلنچی
این الکتروموتور ها که به نام B35 و B34معروف هستند هم دارای فلنچ می باشند و هم در پایین آنها پایه تعبیه شده و از هرکدام در صورت لزوم استفاده می شود.

الکتروموتور برحسب جنس
در حالت کلی میتوانیم الکتروموتورهای صنعتی را به دو گروه مختلف تقسیمبندی کنیم. یکی از این گروهها الکتروموتورهای بدنه آلومینیوم هستند و گروه دیگر دستگاههایی با بدنه چدن میباشند.
دینام صنعتی بر حسب تعداد دور موتور
به این موضوع توجه کنید که گاهی انواع دینام صنعتی را بر حسب تعداد دور موتور آن تقسیمبندی میکنند. الکتروموتور میتواند ۷۵۰ دور، ۱۰۰۰ دور، ۱۵۰۰ دور و ۳۰۰۰ دور باشند. از آنجا که سرعت خروجی الکتروموتور با دور بالا یعنی ۳۰۰۰ دور بسیار زیاد است، طرفداران بسیار زیادی در صنایع مختلف دارد. برای استعلام قیمت الکتروموتور سه فاز ۳۰۰۰ دور یا الکتروموتور تک فاز ۳۰۰۰ دور با کارشناسان مجموعه رایکا صنعت تماس بگیرید.
الکتروموتور بر حسب میزان ولتاژ
اما جالب است بدانید که الکتروموتورها را میتوان از لحاظ میزان ولتاژ نیز تقسیمبندی کرد. در این حالت آنها به دو گروه تک فاز و سه فاز تقسیمبندی میشوند. شما ممکن است این محصولات را با نام موتور الکتریکی تک فاز و موتور الکتریکی سه فاز نیز بشناسید. در حقیقت این تقسیمبندی بر حسب میزان ولتاژی است که وارد دستگاه میشود. شما میتوانید برای استعلام قیمت الکتروموتور سه فاز و قیمت دینام صنعتی تک فاز به فروشگاه اینترنتی رایکا صنعت مراجعه نمایید.
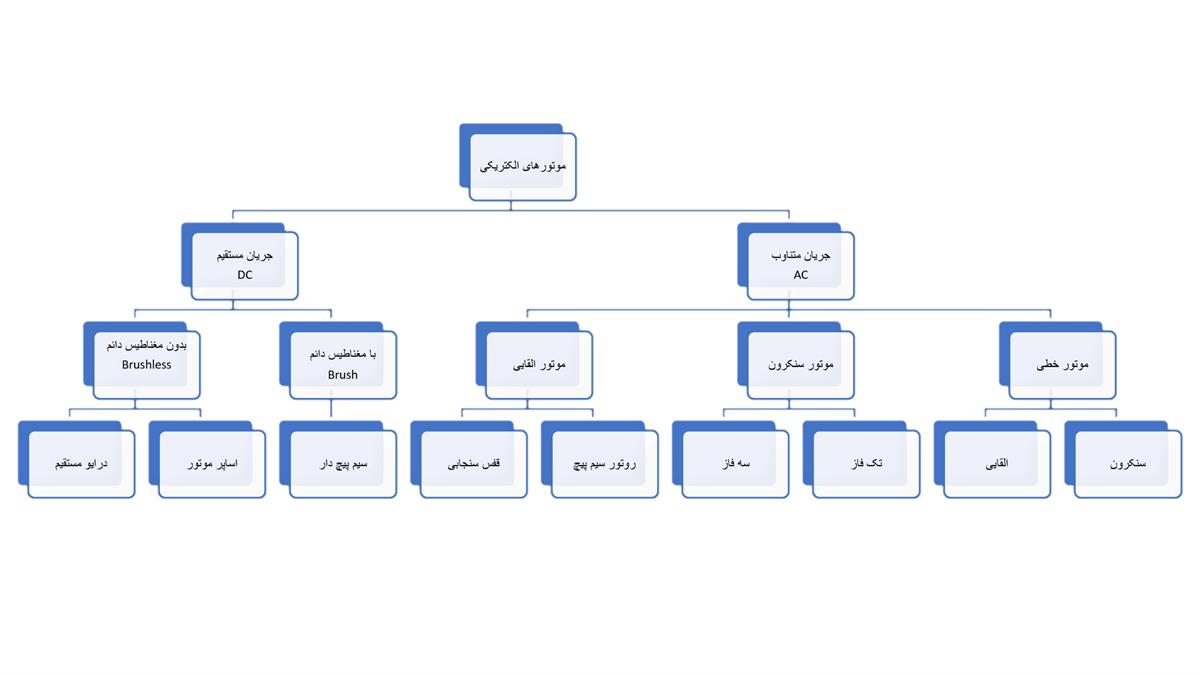
الکتروموتور بر حسب جریان
الکتروموتورهای صنعتی بر اساس جریان به دو گروه مستقیم DC و متناوب AC تقسیمبندی میشوند. هر کدام از آنها نیز زیر گروههای متفاوت خاص خودشان را دارند.
الکتروموتور AC
تغذیه این دستگاهها که به آنها موتورهای الکتریکی جریان متناوب نیز میگویند، از جریان متناوب است. در ساختار این موتورهای الکتریکی استاتور سیم پیچی شده است. این محصول در دو نوع الکتروموتور AC سنکرون و الکتروموتور AC آسنکرون یا موتور القایی تولید میشود.
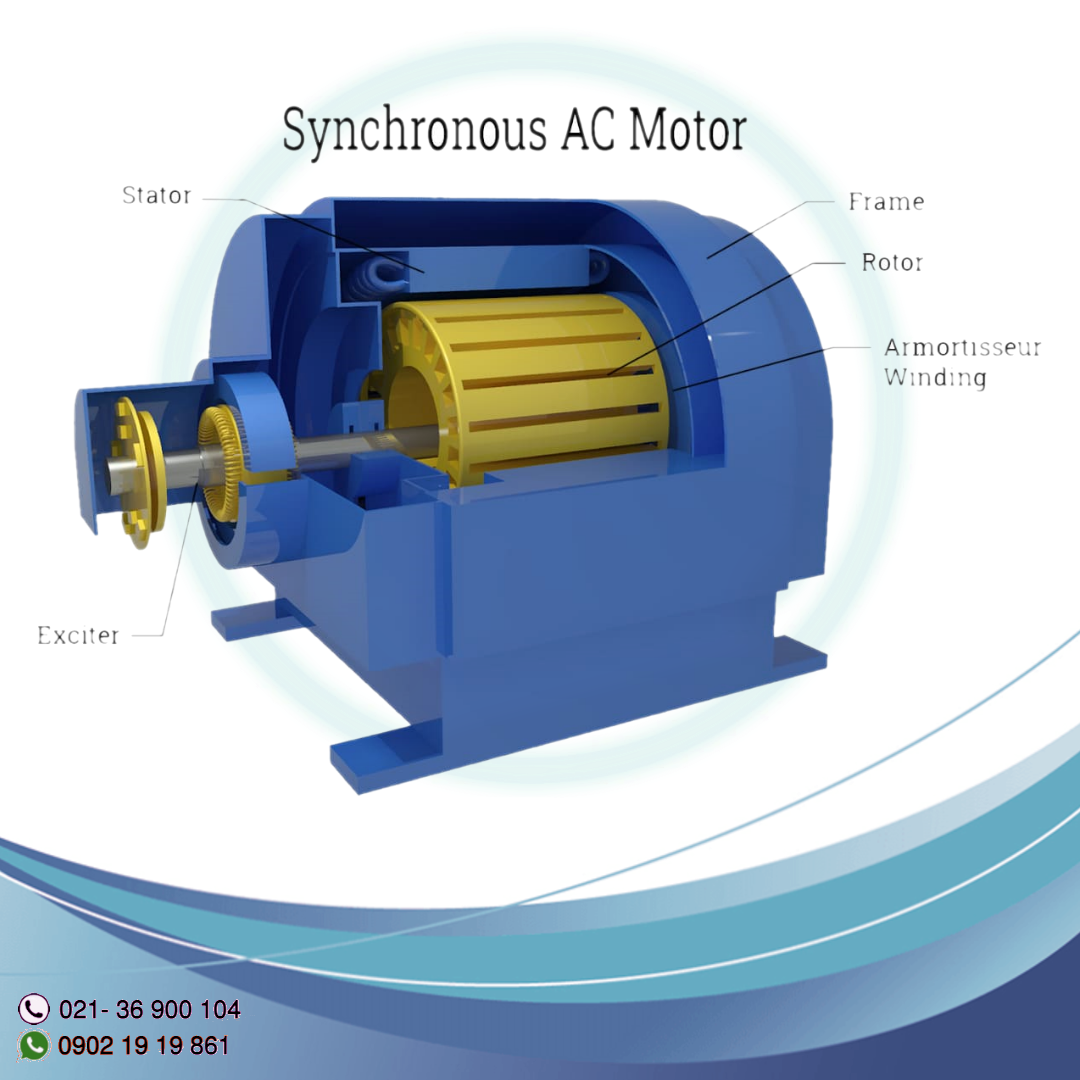
الکتروموتور AC سنکرون
در الکتروموتورهای سنکرون، سرعت دور روتور میدان مغناطیسی به وجود آمده توسط چرخش استاتور برابر است و به همین علت به آن موتور همزمان نیز میگویند. این دستگاه بازدهی بالایی دارد و در ولتاژهای بالا به صورت مستقیم به منبع وصل میشود. اگر بخواهید از معایب این دستگاه بدانید باید به ثابت بودن سرعت اشاره کنیم زیرا نمیتوان از آن در دستگاههای استفاده کرد که احتیاج به سرعت متغیری دارد.
الکتروموتور AC آسنکرون
در الکتروموتور AC آسنکرون، تعداد دور روتور کمتر از دور استاتور میباشد. از آنجا که استاتور و روتور همزمان نیستند به این دستگاه، موتور غیر همزمان نیز میگویند. ممکن است که شما این دستگاه را با نام الکتروموتور القایی نیز بشناسید. این محصول در دو نوع سنجابی و سیم پیچی تولید و عرضه میشود. جالب است بدانید که بسیاری از دینامهای صنعتی امروزی از نوع سه فاز القایی هستند. اگر به لیست قیمت الکتروموتور در انواع مختلف نگاهی بیندازید، متوجه میشوید که قیمت دینام صنعتی مناسب است و صاحبان صنایع معمولا اقدام به خرید این محصول میکنند. نکته قابل ذکر دیگر این است که انواع الکتروموتور تک فاز ایرانی یا خارجی در مدلهای استارت خازنی، قطب سایهدار، الکتروموتورهای خازن دائمی و تک فاز شکسته تقسیم بندی میشوند.
موتور خطی نیز یک موتور الکتریکی القایی میباشد که در آن حرکت استاتور و روتور باعث گشتاور چرخشی نمیشوند بلکه نیروی خطی تولید میشود و خروجی حرکت طولی است. موتور پلهای نوع دیگری از الکتروموتورهای سنکرون میباشد که حرکتش به صورت پلهای میباشد.
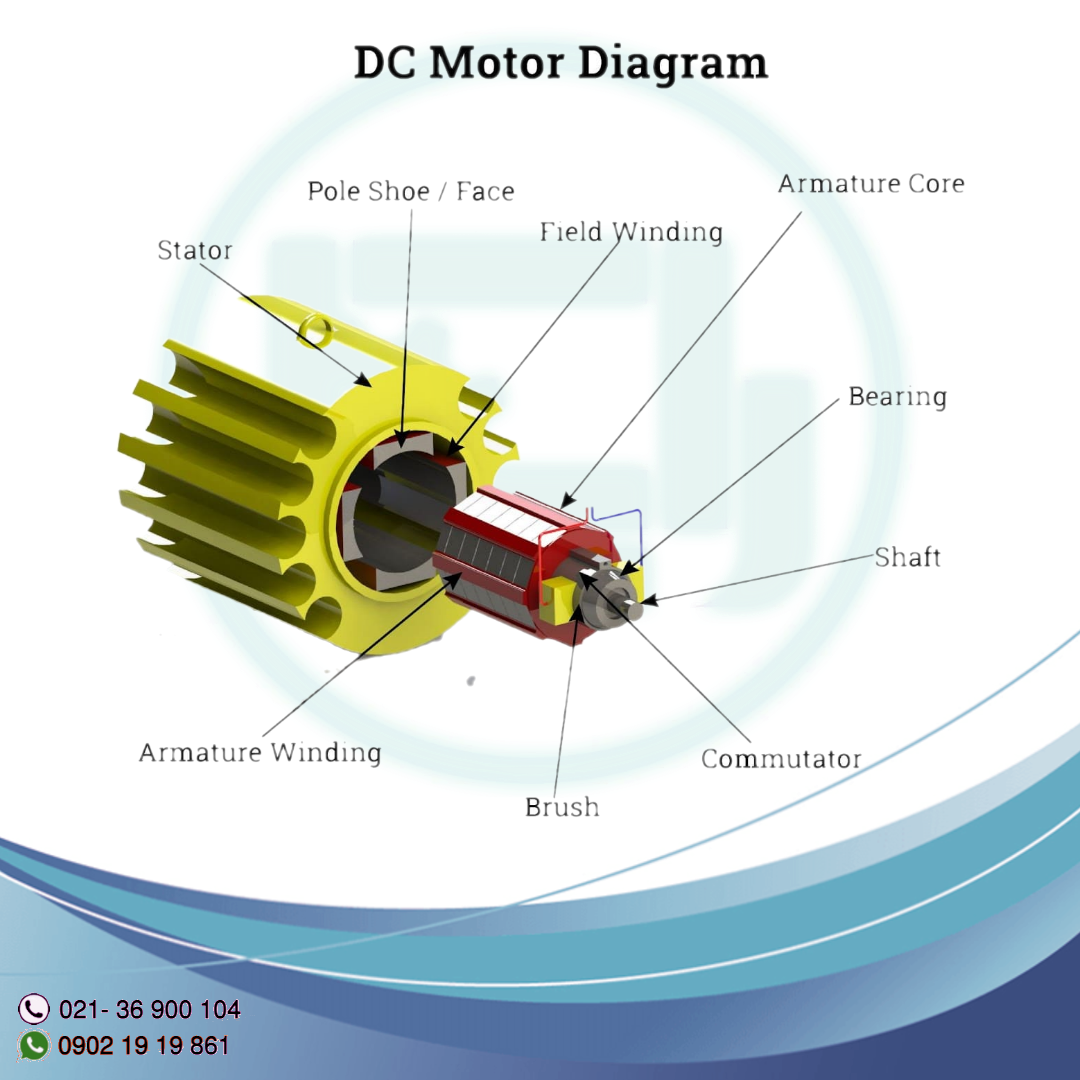
الکتروموتور DC
الکتروموتور DC یا الکتروموتور جریان مستقیم یک روتور آهنربایی دارد. این دستگاه دارای قطعهای به نام کموتاتور میباشد که فقط روی این موتورها دیده میشود. وظیفه این قطعه برعکس کردن جریان الکتریکی میباشد. که کموتاتور دو بار در هر دور جریان الکتریکی را برعکس خواهد کرد و همین موضوع باعث ایجاد جریان مغناطیسی میشود. این دستگاهها در انواع مختلف موتور DC با تحریک سری و الکتروموتور DC با تحریک شنت تولید میشوند. موتور DC با تحریک سری استاتور به شکل سری به روتور وصل میشود و دستگاه برای استارت احتیاج به گشتاور بالایی نخواهد داشت. در نوع دوم که با تحریک شنت است، سیم پیچ استاتور به سیم پیچ روتور وصل شده است.
مقایسه الکتروموتور های AC و DC
الکتروموتورهای DC دارای ساختاری پیچیدهتر از الکتروموتورهای AC هستند و استفاده گستردهتری در برنامههای صنعتی و کنترلی دارند. در ادامه، توضیحات بیشتری درباره الکتروموتورهای DC ارائه میدهم:
- ساختار الکتروموتور DC: این نوع الکتروموتورها شامل یک سیمپیچ (coil) و یک میدان مغناطیسی دائم یا نیمههادی است که قرار داده شده است. سیمپیچ، که به عنوان پیچ لقاح (armature coil) نیز شناخته میشود، بر روی یک قالب فلزی قرار دارد و به یک کاموتاتور متصل است. کاموتاتور شامل حلقههای هادی (commutator segments) است که به سیمپیچ وصل شدهاند و جهت جریان را تغییر میدهند.
- جهت دهی و جهت تغییر: جهت دهی جریان در الکتروموتورهای DC بر اساس سیستم کاموتاتور و حلقههای هادی انجام میشود. زمانی که جریان الکتریکی از طریق سیمپیچ وارد موتور میشود، با تماس با حلقههای هادی، جهت جریان تغییر میکند. این تغییر جهت باعث تغییر جهت گشتاور و چرخش موتور میشود.
- کنترل سرعت: یکی از مزیتهای الکتروموتورهای DC، قابلیت کنترل دقیق سرعت است. با تغییر ولتاژ و جریان الکتریکی که به موتور میرسد، میتوان سرعت چرخش موتور را تنظیم کرد. این ویژگی موتورهای DC را برای برنامههایی که نیاز به کنترل دقیق سرعت و عملکرد پویا دارند، بسیار مناسب میکند.
- کارکرد پایدار: الکتروموتورهای DC پایدارتر از الکتروموتورهای AC در سرعتهای پایین را دارند. آنها قادر به تولید گشتاور بالا و پایدار در سرعتهای پایین هستند، که برای برنامههایی مانند نقالهها، بالابرها و خودروهای الکتریکی بسیار مهم است.
- نوسانات و نویز کمتر: الکتروموتورهای DC نوسانات و نویز کمتری در مقایسه با الکتروموتورهای AC تولید میکنند. این ویژگی آنها را برای برنامههایی که نیاز به عملکرد صامت و کم صدا دارند، مناسب میکند. این امر برای برنامههایی مانند رباتیک، دستگاههای پزشکی و صنایع برق و الکترونیک بسیار حائز اهمیت است.

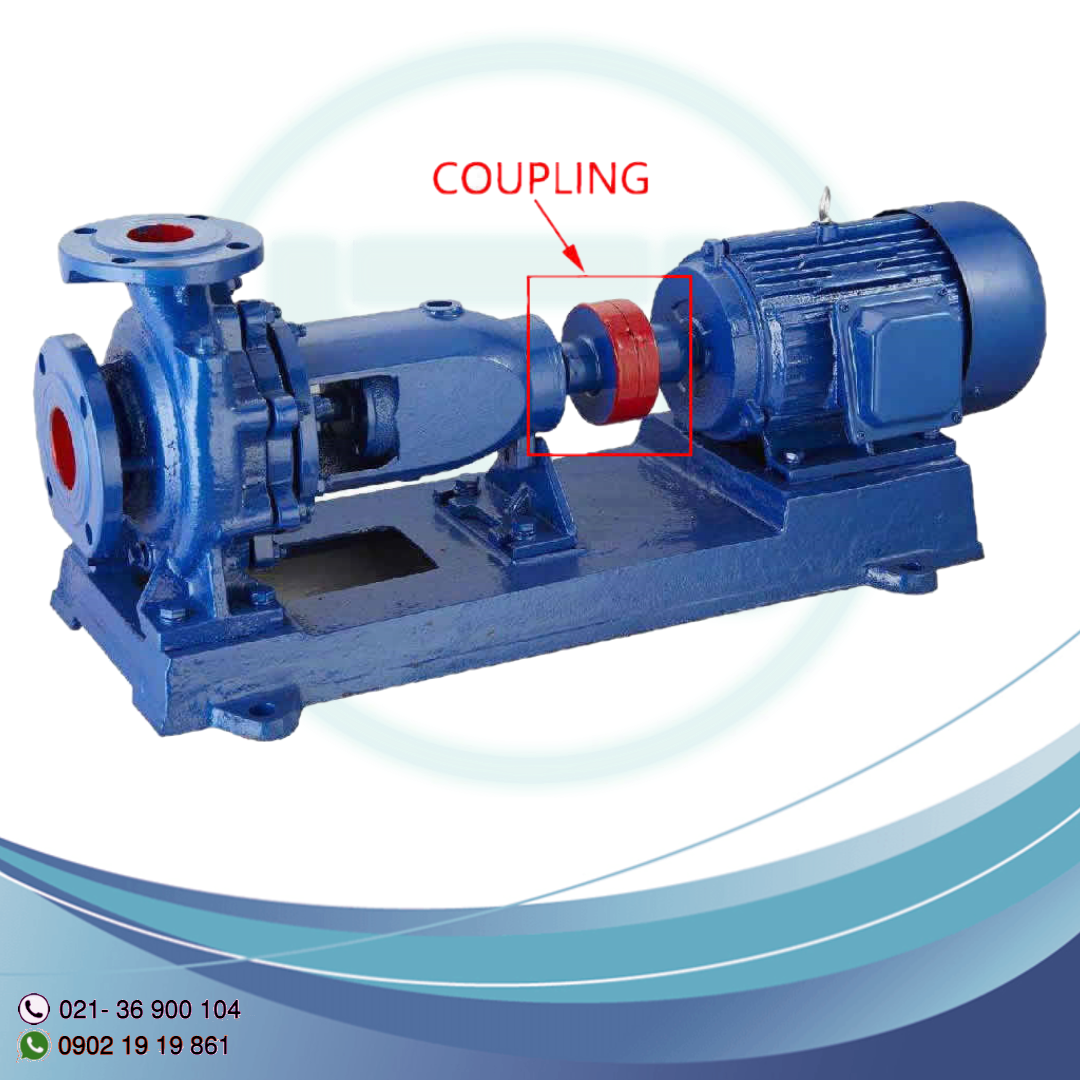
نحوه اتصال الکتروموتور به پمپ
اتصال الکتروموتور به پمپ در صنایع پمپاژ به وسیله یک مکانیزمی به نام مفصل مکانیکی (Coupling) صورت میگیرد. مفصل مکانیکی یک وسیله است که الکتروموتور را با پمپ متصل میکند و انتقال حرکت و قدرت از الکتروموتور به پمپ را فراهم میکند. برای خرید الکتروموتور باید بدانید نحوه اتصال الکتروموتور به پمپ ممکن است بسته به نوع پمپ و الکتروموتور و شرایط نصب متفاوت باشد، اما به طور کلی روشهای زیر معمولاً استفاده میشوند:
اتصال مستقیم:
در این روش، الکتروموتور بطور مستقیم و بدون واسطه به پمپ متصل میشود. به این منظور، شفت الکتروموتور به شفت پمپ متصل میشود. یا پروانه و موتور روی یک شفت قرار می گیرند. اتصال مستقیم بهینهترین روش اتصال میان الکتروموتور و پمپ است و استفاده از مفصل مکانیکی در این حالت لازم نیست. این روش معمولاً برای پمپهای کوچکتر و الکتروموتورهای با سایز کوچک و متوسط استفاده میشود.

اتصال با استفاده از مفصل مکانیکی کوپلینگ
در این روش، یک تجهیز به عنوان مفصل مکانیکی بین شفت الکتروموتور و شفت پمپ قرار میگیرد. مفصل مکانیکی میتواند به صورت یک جفت قلاب، یک جفت جوشکاری، یک جفت پیچ و مهره یا سایر روشهای اتصال مکانیکی باشد. این روش برای الکتروموتورهای بزرگتر و پمپهای با سایز بزرگتر استفاده میشود و امکان تنظیم و جداسازی الکتروموتور و پمپ را فراهم میکند.
انواع اتصالات
از لحاظ نحوه قرارگیری و اتصالات الکتروموتور بر روی زمین گیربکس می توان الکتروموتورها را به پنج دسته زیرتقسیم کرد :
- B3: فقط دارای یایه است
- B5: فلنج بیرونی دارد (قطر فلنج بیشتر از قطر موتور است)
- B14: فلنج داخلی دارد (قطر فلنج کوچکتر از موتور است)
- B35: پایه نصب شده + فلنج بیرونی (ترکیب B3 و B5)
- B34: پایه نصب شده + فلنج داخلی (ترکیب B3 و B14)
طرح را اغلب می توان از روی پلاک نام خواند. با این حال، با استفاده از نقشه های زیر نیز می توان آن را تعیین کرد.

در هر دو روش اتصال مستقیم و با استفاده از کوپلینگ، مهم است که انطباق صحیحی بین شفت الکتروموتور و شفت پمپ ایجاد شود تا انتقال حرکت و قدرت به طور صحیح انجام شود. همچنین، در نصب و اتصال الکتروموتور به پمپ، الزامات ایمنی و استانداردهای مربوطه باید رعایت شود و بهتر است توسط یک تکنسین مجرب انجام گیرد.
نکات مهم در خرید الکتروموتور
شما دوستان عزیز هنگام خرید این محصول، جدا از قیمت الکتروموتور باید به مشخصات فنی آن که روی پلاک موتور نصب شده است، دقت کنید. شما حتماً باید به فضا و ابعاد این دستگاه توجه نمایید. حتماً دستگاهی با برندی معتبر تهیه کنید. به میزان گشتاور دینام صنعتی دقت کنید که بالا باشد. اگر محل استفاده این دستگاه محیطی پر گرد و غبار است، دستگاهی با پوسته مقاوم یا ضد زنگ انتخاب نمایید.
برندهای معتبر الکتروموتور صنعتی
اگر بخواهیم از برندهای بسیار معتبر الکتروموتور صنعتی نام ببریم، میتوانیم به انواع الکتروموتور خارجی که ساخت اروپا هستند مانند الکتروموتور زیمنس، WEG، الکتروموتور VEM و ABB اشاره کنیم. این برندها بسیار معتبر هستند. الکتروموتور آلمانی زیمنس و سایر برندهای مذکور، طرفداران بسیاری دارند. از برندهای الکتروموتور چینی میتوان به فلندر، کایجیلی و استریم اشاره کرد. به خاطر بسپارید که مجموعه رایکا صنعت محصولات خود را با این برندهای بسیار با کیفیت و معتبر به شما دوستان گرامی ارائه میدهد. فراموش نکنیم قیمت الکتروموتور با برند معروف بیشتر از دیگر الکتروموتور های معمولی می باشد اما قابل ذکر است ایم مجموعه همواره سعی کرده محصولات خود را با قیمت های رقابتی نسبت به رقبا به مشتریان عزیز عرضه نماید.
خرید الکتروموتور از رایکا صنعت
شما دوستان گرامی میتوانید برای خرید الکتروموتور تک فاز، سه فاز ضد انفجار، خرید الکتروموتور کوچک، الکتروموتور پایهدار و حتی خرید پمپ آب خانگی با برندهای معتبر و کیفیت عالی به رایکا صنعت مراجعه نمایید. به خاطر بسپارید که شما در فروشگاه اینترنتی رایکا صنعت علاوه بر موارد ذکر شده، امکان خرید ابزار دقیق، قطعات تعمیری پمپ و بسیاری از محصولات صنعتی را دارید. کافی است با کارشناسان رایکا صنعت تماس بگیرید و محصول مورد نظرتان را سفارش دهید. به خاطر بسپارید که محصولات صنعتی مورد نظر شما با مدل و برند دلخواهتان در رایکا قابل تهیه خواهد بود. کارشناسان این مجموعه پاسخگوی تمامی سوالات شما عزیزان خواهند بود و شما میتوانید با آنها مشاوره رایگان داشته باشید.
ساعات کاری
شنبه تا چهارشنبه - 9 صبح الی 17 عصر
شماره های تماس